广泛应用于GNSS定位,航空摄影测量,工业测量和工程测量。
传统的后方交会是以测角为主,随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用。
目前,全站仪已逐渐普及,利用全站仪可以方便地同时测角和测边,因此在实际工作中,就存在测边、测角、边角同测后方交会坐标计算方法。在工程测量中,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法之一。
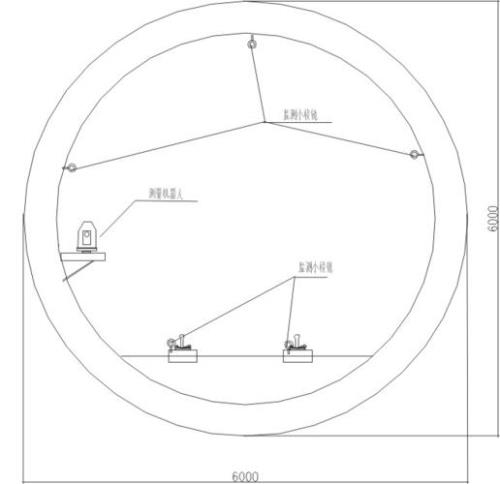
后方交会的原理,定义 1(测角后方交会):后方交会是指仅在未知点 P 上架设仪器,向最低三个或三个以上的已知控制点 A、 B 、C 观测两个水平夹角 α,β,从而计算未知点的坐标。
由于测距仪以及全站仪逐渐的广泛使用 ,后方交会 还有如下的两种解释:边长角度同测的后方交会以及仅仅测边后方交会。定义2(测边后方交会):在未知点P 上向控制点 , 观测两个水平距离 PA、PB 的边长 a 、 b ,再利用三边求解三角形,从而加密 P 点的坐标。定义 3(边角同测后方交会):在未知的控制点上 P 上安置仪器,再向已知点 A、B 观测两个边长的距离 以及水平角γ ,进而求得 P 点的坐标。
总之,后方交会,就是在未知点设站,通过观测已知点,推算未知点坐标的测量方式。