激光线与相机同时旋转,在扫描的过程中,与光平面相交的点会在图像上成像,将成像的2D点带入光平面方程,就可以获得3D点云.关于在旋转过程中,相机坐标系发生改变,点云如何归到一个坐标系下呢?所以有一个前提,已知运动路径的情况下才能将点云拼接起来.
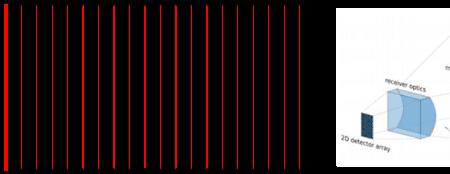
激光线扫描工作原理
原创 | 2023-01-11 13:38:32 |浏览:1.6万
猜你想问
-
 形容水电相融句子 开通VIP形容水电站的句子快到大坝的时候,一个如坛一般的小山映入眼帘,这就是尽管大坝的最佳地点了。登山阶梯,到达顶端,大坝的四周尽收眼底,中心还有一个石碑,上面记述...
形容水电相融句子 开通VIP形容水电站的句子快到大坝的时候,一个如坛一般的小山映入眼帘,这就是尽管大坝的最佳地点了。登山阶梯,到达顶端,大坝的四周尽收眼底,中心还有一个石碑,上面记述... -
 瑞丽湾旅游开发有限公司是国企 不是国企,是私企。瑞丽市瑞丽湾旅游开发有限公司成立于2012-05-07,法定代表人为邱国刚,注册资本为6000万元人民币,统一社会信用代码为915331025945767003,企业地址位于...
瑞丽湾旅游开发有限公司是国企 不是国企,是私企。瑞丽市瑞丽湾旅游开发有限公司成立于2012-05-07,法定代表人为邱国刚,注册资本为6000万元人民币,统一社会信用代码为915331025945767003,企业地址位于... -
 界限不明近义词 近义词:朦朦胧胧指人意识不十分清晰或事物界限不清。出处明·施耐庵《水浒传》第31回:“走了一五更,天色朦朦胧胧,尚未明亮。”例句秋雨不像春的蒙蒙细雨,也不像夏的嚎...
界限不明近义词 近义词:朦朦胧胧指人意识不十分清晰或事物界限不清。出处明·施耐庵《水浒传》第31回:“走了一五更,天色朦朦胧胧,尚未明亮。”例句秋雨不像春的蒙蒙细雨,也不像夏的嚎... -
 c语言float占几个字节 c语言float占4个字节C语言中float浮点型数据类型,FLOAT 数据类型用于存储单精度浮点数或双精度浮点数。浮点数使用 IEEE(电气和电子工程师协会)格式。浮点类型的单精...
c语言float占几个字节 c语言float占4个字节C语言中float浮点型数据类型,FLOAT 数据类型用于存储单精度浮点数或双精度浮点数。浮点数使用 IEEE(电气和电子工程师协会)格式。浮点类型的单精... -
 文言文中有哪些字有安慰的意向 文言中的 抚 勉 劝 含有安慰的意思。这几个字表达安慰这种意向时侧重点各有不同。各个字在不同的文言文具体语境中表达安慰意向时也有一些区别。 带安字文言文句...
文言文中有哪些字有安慰的意向 文言中的 抚 勉 劝 含有安慰的意思。这几个字表达安慰这种意向时侧重点各有不同。各个字在不同的文言文具体语境中表达安慰意向时也有一些区别。 带安字文言文句...
