杠杆是一种物理模型科学研究方法。
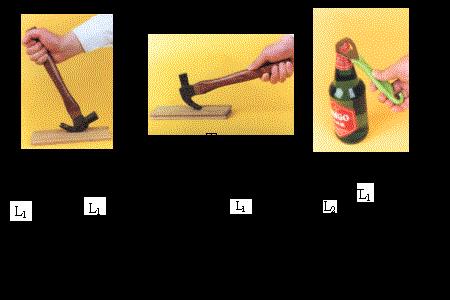
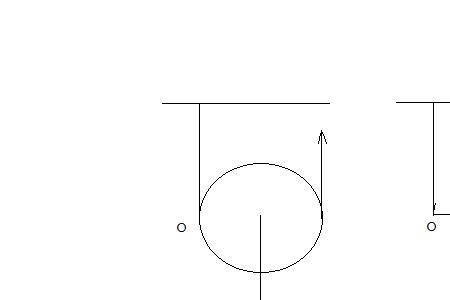
自然界中的许多物体都可以把它抽象到杠杆模型。如滑轮、钢丝钳、钉锤、筷子、船奖、独轮车、自行车的把手和车刹、指甲剪、剪刀等等,都可以把它们抽象成具有五要素的杠杆:动力臂和阻力臂,动力和阻力,支点,而后用杠杆原理解决问题。
原创 | 2023-01-01 11:58:48 |浏览:1.6万
杠杆是一种物理模型科学研究方法。
自然界中的许多物体都可以把它抽象到杠杆模型。如滑轮、钢丝钳、钉锤、筷子、船奖、独轮车、自行车的把手和车刹、指甲剪、剪刀等等,都可以把它们抽象成具有五要素的杠杆:动力臂和阻力臂,动力和阻力,支点,而后用杠杆原理解决问题。



Copyright 2005-2020 www.kxting.com 版权所有 |  湘ICP备2023022655号
湘ICP备2023022655号
声明: 本站所有内容均只可用于学习参考,信息与图片素材来源于互联网,如内容侵权与违规,请与本站联系,将在三个工作日内处理,联系邮箱:47085,1089@qq.com