IMU初始化是为了给局部BA和全局BA提供一个更好的初值从而减少IMU噪声积累。
IMU初始化分解为多个子问题:
估计陀螺仪偏置
忽略加速度计偏置,估计尺度和重力矢量
估计加速度计偏置,进一步优化尺度和重力
估计速度
1、 陀螺仪偏置估计
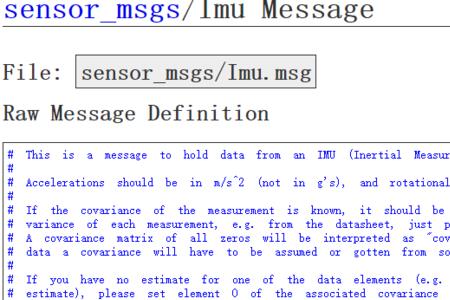
初始化过程假定 b g b^g bg保持不变,每帧的偏置恒定: b i g = b g b_i^g=b^g big=bg。优化 b g b^g bg,最小化所有相邻关键帧对之间的陀螺仪(旋转)预积分及从纯视觉ORB-SLAM2直接视觉计算的旋转之间的误差。
原创 | 2022-12-31 20:53:52 |浏览:1.6万
IMU初始化是为了给局部BA和全局BA提供一个更好的初值从而减少IMU噪声积累。
IMU初始化分解为多个子问题:
估计陀螺仪偏置
忽略加速度计偏置,估计尺度和重力矢量
估计加速度计偏置,进一步优化尺度和重力
估计速度
1、 陀螺仪偏置估计
初始化过程假定 b g b^g bg保持不变,每帧的偏置恒定: b i g = b g b_i^g=b^g big=bg。优化 b g b^g bg,最小化所有相邻关键帧对之间的陀螺仪(旋转)预积分及从纯视觉ORB-SLAM2直接视觉计算的旋转之间的误差。



Copyright 2005-2020 www.kxting.com 版权所有 |  湘ICP备2023022655号
湘ICP备2023022655号
声明: 本站所有内容均只可用于学习参考,信息与图片素材来源于互联网,如内容侵权与违规,请与本站联系,将在三个工作日内处理,联系邮箱:47085,1089@qq.com