四旋翼无人机具有很好的对称性,左右移动跟前后移动原理一模一样。如果想让无人机顺时针旋转,增大2和4的逆时针转速,减小1和3的顺时针转速,显然桨2和4给无人机的顺时针转速大,无人机就会顺时针旋转,而且此时总升力仍然能够等于重力,无人机也不会左右前后倾斜。逆时针旋转也是同样的道理了。
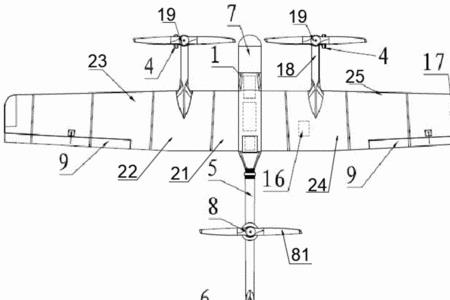
无人机左右旋转原理
原创 | 2022-12-17 17:49:29 |浏览:1.6万
猜你想问
-
 无人与我属于什么低音 歌曲《无人与我》 属于低音D调重嗨。原唱:黄静美词:金属锇曲:小米/曲多美歌词:谁人路上结伴行谁会将心意附赠愿这生 不需再等天高海深 见知音谁可给迷惘解困轻抚我伤...
无人与我属于什么低音 歌曲《无人与我》 属于低音D调重嗨。原唱:黄静美词:金属锇曲:小米/曲多美歌词:谁人路上结伴行谁会将心意附赠愿这生 不需再等天高海深 见知音谁可给迷惘解困轻抚我伤... -
 形容城市街道无人冷清的诗句 唐代诗人孟郊的诗《洛桥晚望》,就是用来形容街道冷清没有人的。天津桥下冰初结,洛阳陌上人行绝。榆柳萧疏楼阁闲,月明直见嵩山雪。...
形容城市街道无人冷清的诗句 唐代诗人孟郊的诗《洛桥晚望》,就是用来形容街道冷清没有人的。天津桥下冰初结,洛阳陌上人行绝。榆柳萧疏楼阁闲,月明直见嵩山雪。... -
 无人车送货为啥说超规了 是超规的,因为现在关于无人车的技术还不完善,而且现行的安全交通法规上还没有完全出台相关的法规。所以说现在无人车送哈不合规,到以后或许会可以。...
无人车送货为啥说超规了 是超规的,因为现在关于无人车的技术还不完善,而且现行的安全交通法规上还没有完全出台相关的法规。所以说现在无人车送哈不合规,到以后或许会可以。... -
 无人看守路口让行规则 驾车通过在没有交通信号灯控制、没有交通标志、标线控制的交叉路口时,两车垂直直行,遵循右侧先行原则,前进方向的右侧车辆拥有优先路权,需要让右侧车辆优先行驶。没有...
无人看守路口让行规则 驾车通过在没有交通信号灯控制、没有交通标志、标线控制的交叉路口时,两车垂直直行,遵循右侧先行原则,前进方向的右侧车辆拥有优先路权,需要让右侧车辆优先行驶。没有... -
 大疆无人机发展史 2006年11月6日扬帆起航 正式踏上征程。2007年• 发布直升机飞控XP2.0 • DJI 大疆飞控第一次达成超视距飞行,突破视野疆界。2008年• 发布第一架自动化电动无人直...
大疆无人机发展史 2006年11月6日扬帆起航 正式踏上征程。2007年• 发布直升机飞控XP2.0 • DJI 大疆飞控第一次达成超视距飞行,突破视野疆界。2008年• 发布第一架自动化电动无人直...
