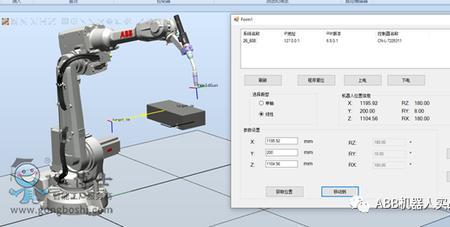
概述:在 RobotStudio 中对机器人动作进行编程时,需要使用目标点(位置)和路径(向目 标点移动的指令序列)。 将 RobotStudio 工作站同步到虚拟控制器时,路径将转换为相应的 RAPID 程序。
目标点:目标点是机器人要达到的坐标。目标点的相关信息同步到虚拟控制器后,将转换为数据类型为robtarget 的实例。
原创 | 2022-12-05 09:26:45 |浏览:1.6万
概述:在 RobotStudio 中对机器人动作进行编程时,需要使用目标点(位置)和路径(向目 标点移动的指令序列)。 将 RobotStudio 工作站同步到虚拟控制器时,路径将转换为相应的 RAPID 程序。
目标点:目标点是机器人要达到的坐标。目标点的相关信息同步到虚拟控制器后,将转换为数据类型为robtarget 的实例。

Copyright 2005-2020 www.kxting.com 版权所有 |  湘ICP备2023022655号
湘ICP备2023022655号
声明: 本站所有内容均只可用于学习参考,信息与图片素材来源于互联网,如内容侵权与违规,请与本站联系,将在三个工作日内处理,联系邮箱:47085,1089@qq.com