四旋翼无人机,任意两个相邻的螺旋桨旋转方向相反,有两个顺时针两个逆时针,飞机通过调控四个螺旋桨的转速大小 来调控它的运动方向。
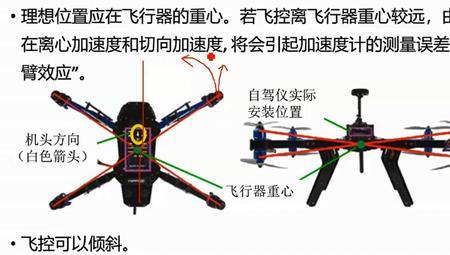
四旋翼无人机桨叶转动规矩
原创 | 2022-11-18 23:29:48 |浏览:1.6万
猜你想问
-
 路虎发现四旋转开关怎么拆 如果拆开开关旋钮,这个旋钮直接向上用力拔就能拔下来了,这开关旋钮使用比较久了,从未取下清理过,里面太脏了,再加上平时清理刷洗以及溢锅等水汽原因,造成总成与旋钮接触...
路虎发现四旋转开关怎么拆 如果拆开开关旋钮,这个旋钮直接向上用力拔就能拔下来了,这开关旋钮使用比较久了,从未取下清理过,里面太脏了,再加上平时清理刷洗以及溢锅等水汽原因,造成总成与旋钮接触... -
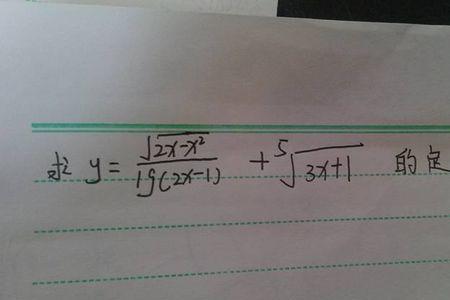 小数怎样开根号 小数开方分为两种情况,一种是小数是一个完全平方数,那就直接开方,比如√0.25=0.5。第二种情况是需要把小数化成分数,然后再把分子分母分别开方,分母有理化,最后把根式化...
小数怎样开根号 小数开方分为两种情况,一种是小数是一个完全平方数,那就直接开方,比如√0.25=0.5。第二种情况是需要把小数化成分数,然后再把分子分母分别开方,分母有理化,最后把根式化... -
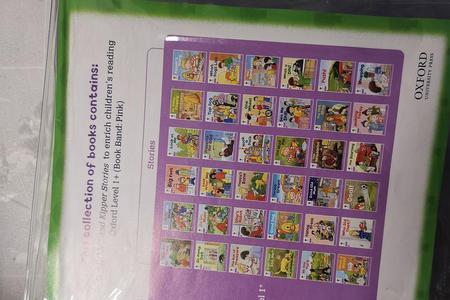 牛津树第一阶零基础可以读吗 牛津树是故事类英文绘本,趣味性比较强,第一阶词汇量还是比较大的,不适合零基础的孩子读。个人建议可以先读海尼曼GK和Raz,把Raz的a到c读完,这样就会积累很大一部分的单...
牛津树第一阶零基础可以读吗 牛津树是故事类英文绘本,趣味性比较强,第一阶词汇量还是比较大的,不适合零基础的孩子读。个人建议可以先读海尼曼GK和Raz,把Raz的a到c读完,这样就会积累很大一部分的单... -
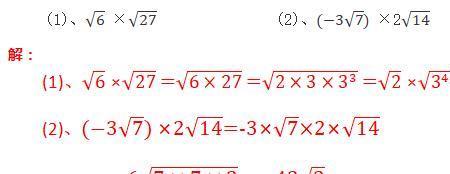 根号乘法运算方法 根式乘法运算方法这是有关根式乘法的运算的题目,我对此题的理解是让你举例来说明根式乘法运算的方法。根式乘法有两种情况,一是同次根式相乘,根指数不变,被开方数相乘...
根号乘法运算方法 根式乘法运算方法这是有关根式乘法的运算的题目,我对此题的理解是让你举例来说明根式乘法运算的方法。根式乘法有两种情况,一是同次根式相乘,根指数不变,被开方数相乘... -
 行政拘留20天没出来怎么办 如果在治安拘留的20天内,发现有犯罪嫌疑,或者认为原先认定的违反治安行为,构成刑事犯罪的,可以转为刑事案件立案调查,变更为刑事拘留,按照刑事立案程序办理。行政拘留的...
行政拘留20天没出来怎么办 如果在治安拘留的20天内,发现有犯罪嫌疑,或者认为原先认定的违反治安行为,构成刑事犯罪的,可以转为刑事案件立案调查,变更为刑事拘留,按照刑事立案程序办理。行政拘留的...
