通过专用CCD相机、工业镜头及光源对产品上的特征位置进行拍照取像,通过图像处理机(PC机 )采集图像数据进行图像处理,并进行位置运算来判断产品的实际位置,并通过与之前设定的基准位置进行对比算出产品的实际偏移值,通过控制对位平台运动,使得产品运动到之前设定的基准位置上,以达到快速,闭环、高精度对位。

ccd视觉定位补偿原理
原创 | 2022-11-18 10:52:12 |浏览:1.6万
猜你想问
-
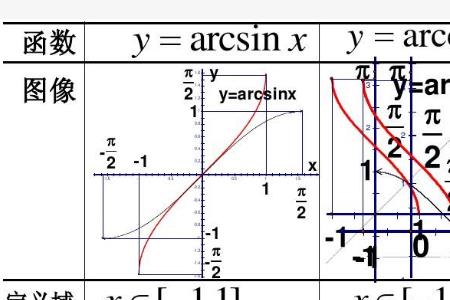 arccos与cos分之一有什么区别 cosx与arccosx,两者互为反函数。arccos表示的是反三角函数中的反余弦。一般用于表示当角度为非特殊角时。由于是多值函数,往往取它的单值,值域为[0,π],记作y=arccosx,...
arccos与cos分之一有什么区别 cosx与arccosx,两者互为反函数。arccos表示的是反三角函数中的反余弦。一般用于表示当角度为非特殊角时。由于是多值函数,往往取它的单值,值域为[0,π],记作y=arccosx,... -
 ccd相机红眼怎么消除 打开相机的“消除红眼”功能基本上现在的相机都带有“消除红眼”的功能,将其打开后,闪光灯会闪两次,第一次是在拍照前的一瞬间,第二次是在真正拍照的时刻。2、提高室...
ccd相机红眼怎么消除 打开相机的“消除红眼”功能基本上现在的相机都带有“消除红眼”的功能,将其打开后,闪光灯会闪两次,第一次是在拍照前的一瞬间,第二次是在真正拍照的时刻。2、提高室... -
 ccd相机怎么关声音 关声音操作流程如下:相机的机器在屏幕的工具栏里可以选择静音点击后就可以关声音了。按面板上浏览照片的三角形播放键▶️,然后选第三个选项卡锤子和扳手图标的,第一个...
ccd相机怎么关声音 关声音操作流程如下:相机的机器在屏幕的工具栏里可以选择静音点击后就可以关声音了。按面板上浏览照片的三角形播放键▶️,然后选第三个选项卡锤子和扳手图标的,第一个... -
 剑齿虎150cc摩托车怎么样 外形设计很好看。在外形设计的审美上面,符合大众人的审美,而且摩托车的性能也比较稳定。剑齿虎150踏板摩托车不是大厂的车额。这是个杂牌组装的踏板车,这种踏板车的...
剑齿虎150cc摩托车怎么样 外形设计很好看。在外形设计的审美上面,符合大众人的审美,而且摩托车的性能也比较稳定。剑齿虎150踏板摩托车不是大厂的车额。这是个杂牌组装的踏板车,这种踏板车的... -
 大众cc化妆镜灯为啥不亮 原因是保险丝熔断了。用尖一点的东西把那个透明的所料盖给撬开,需要点力,检查看灯丝是否烧了。撬的时候观察看哪里有缺口就往哪里撬。遮阳板的化妆镜灯,是打开门控按...
大众cc化妆镜灯为啥不亮 原因是保险丝熔断了。用尖一点的东西把那个透明的所料盖给撬开,需要点力,检查看灯丝是否烧了。撬的时候观察看哪里有缺口就往哪里撬。遮阳板的化妆镜灯,是打开门控按...
